
题目
给你一个 n x 2 的二维数组 points ,它表示二维平面上的一些点坐标,其中 points[i] = [xi, yi] 。
计算点对 (A, B) 的数量,其中
A在B的左上角,并且- 它们形成的长方形中(或直线上)没有其它点(包括边界)。
返回数量。
示例 1:
输入:points = [[1,1],[2,2],[3,3]]
输出:0
解释:
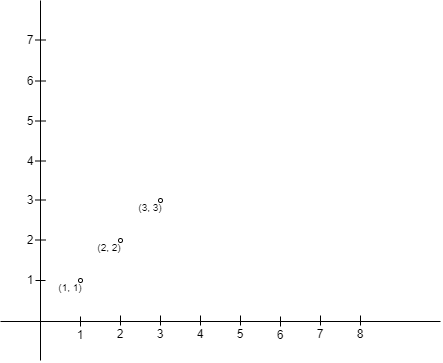
没有办法选择 A 和 B,使得 A 在 B 的左上角。
示例 2:
输入:points = [[6,2],[4,4],[2,6]]
输出:2
解释:
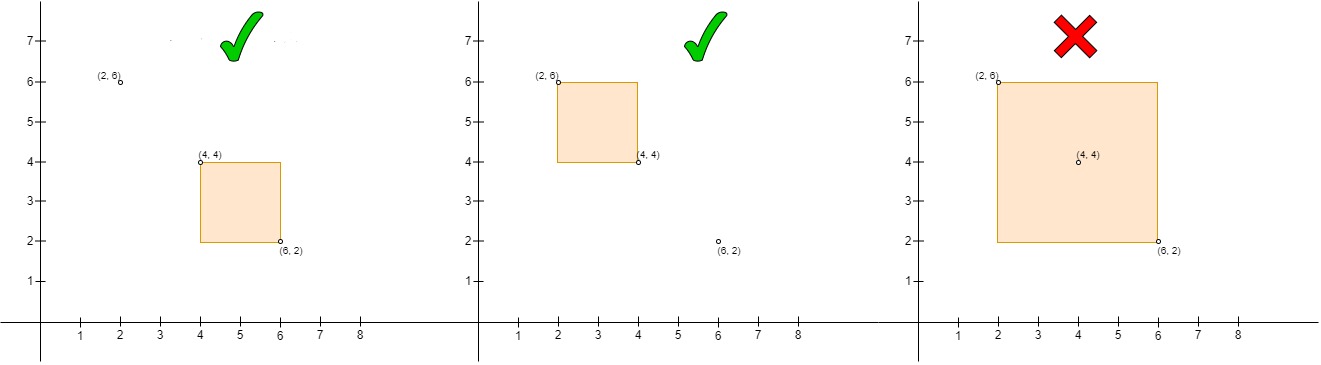
- 左边的是点对
(points[1], points[0]),其中points[1]在points[0]的左上角,并且形成的长方形内部是空的。 - 中间的是点对
(points[2], points[1]),和左边的一样是合法的点对。 - 右边的是点对
(points[2], points[0]),其中points[2]在points[0]的左上角,但points[1]在长方形内部,所以不是一个合法的点对。
示例 3:
输入:points = [[3,1],[1,3],[1,1]]
输出:2
解释:
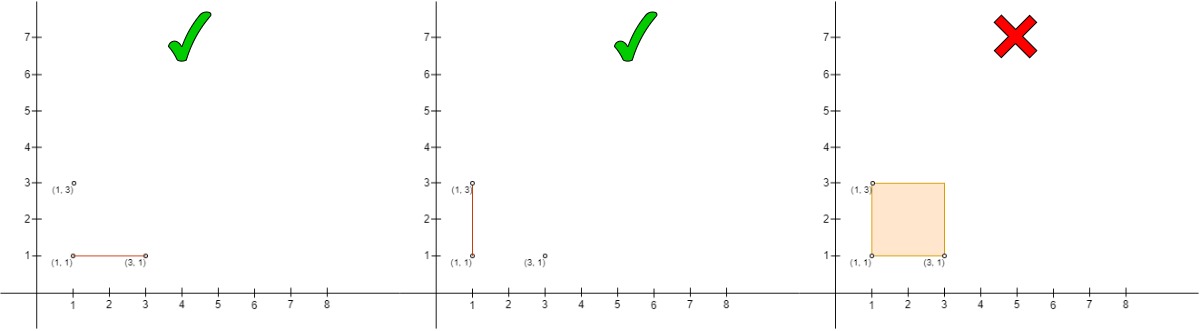
- 左边的是点对
(points[2], points[0]),其中points[2]在points[0]的左上角并且在它们形成的直线上没有其它点。注意两个点形成一条线的情况是合法的。 - 中间的是点对
(points[1], points[2]),和左边一样也是合法的点对。 - 右边的是点对
(points[1], points[0]),它不是合法的点对,因为points[2]在长方形的边上。
提示:
2 <= n <= 50points[i].length == 20 <= points[i][0], points[i][1] <= 50points[i]点对两两不同。
解题思路
- 建立有序性(预处理): 首先,为了避免毫无章法地随意检查点对,第一步是对所有的点进行一次有目的的排序。一个有效的策略是从左到右,从上到下地对所有点进行排列。这一步的目的是为后续的检查建立一个清晰、有序的框架,使得我们能够系统性地、不重复、不遗漏地考察所有可能的点对。
- 系统性地枚举和筛选候选点对: 在排好序的基础上,我们开始系统地寻找可能的点对
(A, B)。具体做法是,我们依次固定每一个点作为潜在的右下角点B。然后,对于每一个固定的B,我们回头去看所有在它“前面”(根据我们第一步的排序规则)的点,将它们作为潜在的左上角点A。通过这种方式,我们只考虑那些在位置上可能构成“左上-右下”关系的点对,排除了大量明显不符的组合。 - 验证“空矩形”区域: 对于每一个经过上一步筛选出的候选点对
(A, B),我们执行最后也是最关键的验证。我们以A和B为对角顶点,构想一个矩形。然后,我们检查除了A和B以外,是否存在任何其他的点落在了这个矩形的内部或边界上。- 如果存在任何一个这样的“第三者”点,那么这个点对
(A, B)就是无效的。 - 只有当这个矩形区域内是“空的”,这个点对
(A, B)才是一个符合题目要求的合法点对,我们就把它计数下来。
- 如果存在任何一个这样的“第三者”点,那么这个点对
具体代码
class Solution {
public:
int numberOfPairs(vector<vector<int>>& points) {
// 自上而下,自左而右排序
sort(points.begin(), points.end(),
[](const vector<int>& a, const vector<int>& b)
{
return a[0] < b[0] || (a[0] == b[0] && a[1] > b[1]);
});
int n = points.size();
bool currentPass = true;
int ans = 0;
for(int i = 0; i < n; i++) // 选定每个右下角的点
{
for(int j = 0; j < i; j++) // 选定理论上每个左上角的点
{
// 检验是不是左上角的点
if(!(points[j][0] <= points[i][0] && points[j][1] >= points[i][1]))
continue;
currentPass = true;
for(int k = j + 1; k < i; k++) // 检验可能在内部的点
{
if(points[k][0] >= points[j][0] && points[k][0] <= points[i][0] && points[k][1] >= points[i][1] && points[k][1] <= points[j][1]) // 检验内部点
{
currentPass = false; // 不合法点对
break;
}
}
// 合法点对
if(currentPass)
ans++;
}
}
return ans;
}
};
优化思路
固定右下角点 B,然后寻找所有可能的左上角点 A,再用第三层循环去检查 A 和 B 之间是否有障碍点。这个检查过程是导致 O(N³) 的主要原因。
我们可以转换一下视角:固定左上角点 A,然后向右寻找所有可能的右下角点 B。
具体思路如下:
- 保持排序不变: 排序方法(
x坐标升序,x相同则y坐标降序)不变,这个优化思路依然依赖于它。 - 转换主视角: 我们写一个外层循环,固定点
A(points[j])。然后内层循环向右遍历 (i从j+1到n-1),寻找所有可以与A配对的点B(points[i])。 - 核心优化:维护一个“下边界” 对于一个固定的
A,当我们向右寻找B时,一个点B要能和A配对,必须满足两个条件: a.B在A的右下方(B.y <= A.y)。 b.A和B构成的矩形区域内没有其他点。这里的关键是条件 b。当我们在j的右侧遍历i时,所有考察过的点points[k](j < k < i) 都是潜在的“障碍物”。一个点points[k]会阻碍(A, B)配对,当且仅当它位于矩形内部,即B.y <= points[k].y <= A.y。为了避免每次都循环检查这些障碍物,我们可以为固定的A维护一个变量,称之为y_lower_bound(下边界)。这个变量记录了在A和当前考察点B之间、且在A下方的所有点中,y 坐标的最大值。- 当我们考察一个新的点
B(points[i]) 时,如果B.y <= A.y,它就是一个候选点。 - 这时,我们检查它是否满足
B.y > y_lower_bound。- 如果满足,说明在
A和B之间没有任何点的y坐标落入[B.y, A.y]的区间内。因此,(A, B)构成一个合法的点对,我们计数加一。同时,因为B本身也可能成为后续点对的障碍,我们需要更新y_lower_bound = max(y_lower_bound, B.y)。 - 如果不满足,说明
B点被y_lower_bound代表的那个“最高”的障碍物挡住了,(A, B)不是合法点对。但我们仍然需要更新y_lower_bound,因为它下面的空间已经被填充了。
- 如果满足,说明在
- 当我们考察一个新的点
通过这种方式,对于每一个固定的 A,我们只需要一层循环向右扫描,并在 O(1) 的时间内完成判断,从而将总时间复杂度降至 O(N²)。
优化代码
class Solution {
public:
int numberOfPairs(vector<vector<int>>& points) {
// 排序规则:x 坐标升序,x 相同则 y 坐标降序
sort(points.begin(), points.end(),
[](const vector<int>& a, const vector<int>& b)
{
return a[0] < b[0] || (a[0] == b[0] && a[1] > b[1]);
});
int n = points.size();
int ans = 0;
// O(N^2) 解法
// 外层循环固定左上角点 A (points[j])
for (int j = 0; j < n; ++j) {
// y_lower_bound 记录了在 A 和 B 之间、且在 A 下方的所有点中,y坐标的最大值。
// 初始为一个极小值。
int y_lower_bound = numeric_limits<int>::min();
// 内层循环从 A 的右侧开始,寻找所有可能的右下角点 B (points[i])
for (int i = j + 1; i < n; ++i) {
// 当前点 B 的 y 坐标
int current_y = points[i][1];
// A 点的 y 坐标
int upper_y = points[j][1];
// B 必须在 A 的下方或同一水平线 (current_y <= upper_y)
// 并且 B 必须在 "下边界" 上方 (current_y > y_lower_bound)
// 这同时满足了两个条件:
// 1. B 是 A 的右下角点
// 2. 在 A 和 B 之间,不存在任何点 p_k 使得 B.y <= p_k.y <= A.y
if (current_y <= upper_y && current_y > y_lower_bound) {
ans++;
// 找到一个合法的 B 之后,它就会成为新的“下边界”,
// 因为任何在它右边且比它更低的点都会被它遮挡。
y_lower_bound = current_y;
}
}
}
return ans;
}
};