
题目
给你两个整数 m 和 n 表示一个下标从 0 开始的 m x n 网格图。同时给你两个二维整数数组 guards 和 walls ,其中 guards[i] = [rowi, coli] 且 walls[j] = [rowj, colj] ,分别表示第 i 个警卫和第 j 座墙所在的位置。
一个警卫能看到 4 个坐标轴方向(即东、南、西、北)的 所有 格子,除非他们被一座墙或者另外一个警卫 挡住 了视线。如果一个格子能被 至少 一个警卫看到,那么我们说这个格子被 保卫 了。
请你返回空格子中,有多少个格子是 没被保卫 的。
示例 1:
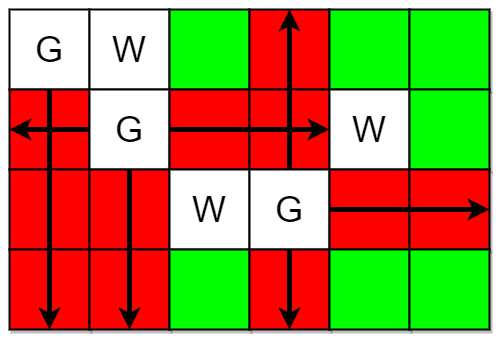
**输入:**m = 4, n = 6, guards = [[0,0],[1,1],[2,3]], walls = [[0,1],[2,2],[1,4]] **输出:**7 **解释:**上图中,被保卫和没有被保卫的格子分别用红色和绿色表示。 总共有 7 个没有被保卫的格子,所以我们返回 7 。
示例 2:
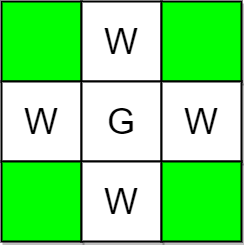
**输入:**m = 3, n = 3, guards = [[1,1]], walls = [[0,1],[1,0],[2,1],[1,2]] **输出:**4 **解释:**上图中,没有被保卫的格子用绿色表示。 总共有 4 个没有被保卫的格子,所以我们返回 4 。
提示:
1 <= m, n <= 10^52 <= m * n <= 10^51 <= guards.length, walls.length <= 5 * 10^42 <= guards.length + walls.length <= m * nguards[i].length == walls[j].length == 20 <= rowi, rowj < m0 <= coli, colj < nguards和walls中所有位置 互不相同 。
解题思路
这道题最核心的难点在于如何处理重叠的视线。
- 一个格子可能同时被它上方的警卫和左边的警卫看到。
- 如果我们遍历每个警卫,去计算“这个警卫能看到多少格子”,然后把所有警卫的结果加起来,就会导致严重的重复计数。
既然“计算”每个警卫的贡献很复杂,我们就应该转换思路:放弃“计算”,转而“模拟”。
我们不去问“这个警卫能看到多少格子?”,而是去问“网格上的每一个格子,它最终的状态是什么?”
这就把问题变成了一个“状态标记”或“地图染色”的问题。
- 创建一个 $m \times n$ 的二维数组
grid。 - 我们约定几种状态:
0: 空地 (初始状态,未被保卫)1: 已保卫 (被警卫“染上颜色”的空地)2: 障碍物 (墙或警卫,它们会挡住视线)
- 在模拟视线(染色)之前,我们必须先把所有会“挡住颜料”的东西放到地图上。
- 遍历
walls数组,把grid[r][c]标记为2(障碍物)。 - 遍历
guards数组,把grid[r][c]也标记为2(障碍物)。- 关键点: 警卫自己也会挡住其他警卫的视线,所以他们也是障碍物。
- 现在,我们再次遍历
guards数组(这次是为了让他们“喷射颜料”)。 - 对于每一个警卫,我们让他向四个方向(东、南、西、北)“喷射”状态
1。 - 染色规则:
- 颜料(视线)从警卫的下一个格子开始。
- 如果遇到
0(空地),就把它染成1(已保卫),然后继续前进。 - 如果遇到
1(已被保卫),说明这个格子已经被别的警卫染过了。我们不需要重复计数,但颜料(视线)可以穿过它,继续前进。 - 如果遇到
2(障碍物),颜料(视线)被挡住了,停止这个方向的染色。
- 当所有警卫都完成了“染色”工作后,我们的
grid地图就有了最终的状态。 - 此时,我们最后遍历一次地图:
- 统计所有格子里,状态仍然是
0(空地) 的格子数量。 - 这个数量,就是最终“未被保卫”的格子数。
这种“状态模拟”的方法,通过 grid 数组这个媒介,极其巧妙地解决了“视线重叠”的核心问题。
- 一个格子
[r, c]无论被多少个警卫的视线扫过,它只会在第一次从0变为1。 - 之后再有视线扫过它,它的状态保持为
1,不会被错误地累加。 - 我们最终只关心格子的最终状态 (
0还是1),而不是它“被看到了多少次”。
复杂度分析
设 $m$ 为网格行数, $n$ 为网格列数,$G$ 为警卫数量 (len(guards)),$W$ 为墙的数量 (len(walls))。
时间复杂度: $O(m \times n + G + W)$
这个复杂度是线性的,非常高效。我们把它分解来看:
- 初始化网格 ( $O(m \times n)$ ):
- 创建一个 $m \times n$ 的二维数组
grid,需要 $O(m \times n)$ 的时间。
- 创建一个 $m \times n$ 的二维数组
- 标记障碍物 ( $O(G + W)$ ):
- 遍历
walls数组并标记grid,花费 $O(W)$。 - 遍历
guards数组并标记grid,花费 $O(G)$。
- 遍历
- 模拟视线 ( $O(m \times n)$ ):
- 这是最关键的一步。我们遍历所有 $G$ 个警卫,每个警卫向 4 个方向扫描。
- 正如我们之前详细分析的,虽然外层循环是 $G$ 次,但由于障碍物(墙和警卫)会阻挡视线,每个格子最多只会被来自 4 个方向的扫描各访问一次。
- 因此,这一整步的总工作量上限是 $O(4 \times m \times n)$,即 $O(m \times n)$。
- 统计结果 ( $O(m \times n)$ ):
- 最后,遍历一次 $m \times n$ 的网格来统计所有状态为
0的格子,花费 $O(m \times n)$。 - (如果我们使用了优化版的解法,在“染色”时就计数,那么这一步就是 $O(1)$)。
- 最后,遍历一次 $m \times n$ 的网格来统计所有状态为
总结:
无论是否优化,总时间复杂度都是:
$O(m \times n) + O(G + W) + O(m \times n) + O(m \times n \text{ or } 1)$
这可以简化为 $O(m \times n + G + W)$。
空间复杂度: $O(m \times n)$
grid数组:- 算法的核心开销在于我们创建了一个 $m \times n$ 的二维数组
grid来存储地图上每个格子的状态。 - 这是必需的,因为它让我们能够正确处理视线的交叉和重叠。
- 算法的核心开销在于我们创建了一个 $m \times n$ 的二维数组
- 其他:
directions数组是 $O(1)$ 的常数空间。- 没有使用递归,所以没有额外的栈空间开销。
因此,空间复杂度完全由 grid 数组决定,即 $O(m \times n)$。
具体代码
func countUnguarded(m int, n int, guards [][]int, walls [][]int) int {
// 定义状态
const (
EMPTY = 0 // 空地 (未被保卫)
GUARDED = 1 // 已被保卫
OBSTACLE = 2 // 障碍物 (墙 或 警卫)
)
// 1. 初始化网格
grid := make([][]int, m)
for i := range grid {
grid[i] = make([]int, n)
}
// 2. 放置障碍物 (墙)
for _, wall := range walls {
grid[wall[0]][wall[1]] = OBSTACLE
}
// 2. 放置障碍物 (警卫)
for _, guard := range guards {
grid[guard[0]][guard[1]] = OBSTACLE
}
// 定义四个方向: 北, 南, 西, 东
directions := [][]int{{-1, 0}, {1, 0}, {0, -1}, {0, 1}}
// 3. 模拟警卫视线 ("染色")
for _, guard := range guards {
r, c := guard[0], guard[1]
for _, dir := range directions {
dr, dc := dir[0], dir[1]
// 从警卫的下一个格子开始扫描
nr, nc := r+dr, c+dc
// 持续向一个方向扫描,直到出界
for nr >= 0 && nr < m && nc >= 0 && nc < n {
// 如果遇到障碍物 (墙或另一个警卫),停止这个方向的扫描
if grid[nr][nc] == OBSTACLE {
break
}
// 如果是空地,标记为 "已被保卫"
// 如果已经是 GUARDED,保持不变,视线继续穿过
if grid[nr][nc] == EMPTY {
grid[nr][nc] = GUARDED
}
// 移动到下一个格子
nr += dr
nc += dc
}
}
}
// 4. 统计结果
count := 0
for r := 0; r < m; r++ {
for c := 0; c < n; c++ {
// 只计算状态为 EMPTY (0) 的格子
if grid[r][c] == EMPTY {
count++
}
}
}
return count
}